AIR FRAME INTEGRATED SCRAMJET ENGINE INLET CONFIGURATION

1. INTRODUCTION
1.1 GENERAL
A scramjet (supersonic
combustion ramjet) is a variant of a ramjet air-breathing combustion jet engine
in which the combustion process takes place in supersonic airflow. As in
ramjets, a scramjet relies on high vehicle speed to forcefully compress and decelerate
the incoming air before combustion (hence ramjet), but whereas a ramjet
decelerates the air to subsonic velocities before combustion, airflow in a
scramjet is supersonic throughout the entire engine.

This allows the scramjet to efficiently operate at hyper-sonic speeds (Mach >5) theoretical projections place the top speed of a scramjet between Mach 12 and Mach 24, which is near orbital velocity. An airframe-integrated scramjet is basically composed of three basic components: a converging air intake, where incoming air is compressed and decelerated; a combustion, where gaseous fuel is burned with atmospheric oxygen to produce heat; and a diverging nozzle, where the heated air is accelerated to produce thrust.

1.2 DEFINITION OF A SCRAMJET ENGINE
In order
to provide the definition of a scramjet engine, the definition of a ramjet
engine is first necessary, as a scramjet engine is a direct descendant of a
ramjet engine.
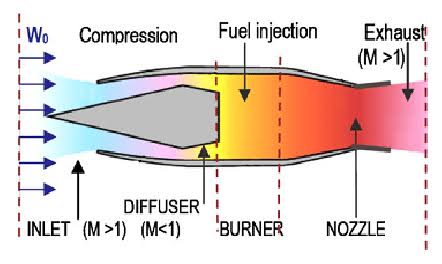
Ramjet
engines have no moving parts, instead operating on compression to slow
freestream supersonic air to subsonic speeds, thereby increasing temperature
and pressure, and then combusting the compressed air with fuel. Lastly, a
nozzle accelerates the exhaust to supersonic speeds, resulting in thrust.
Figure 1 below shows a two-dimensional schematic of a ramjet engine.
Fig 1.2
TWO-DIMENSIONAL SCHEMATIC OF A
RAMJET ENGINE
Due to the deceleration of the
freestream air, the pressure, temperature and density of the flow entering the burner
are considerably higher than in the freestream. At flight Mach numbers of
around Mach 6, these increases make it inefficient to continue to slow the flow
to subsonic speeds. Thus, if the flow is no longer slowed to subsonic speeds,
but rather only slowed to acceptable supersonic speeds, the ramjet is then
termed a

Though the concept of ramjet and
scramjet engines may sound like something out of science fiction, scramjet
engines have been under development for at least forty years. The following
subsection will give a brief chronological history of the scramjet engine.
1.3 SCRAMJET ENGINE HISTORICAL TIMELINE

It is the intention of this section to provide a
brief introduction to the historical timeline of the scramjet, so as to provide
a knowledge base for the current project. There have been many authors that
have provided more thorough historical accounts of both the ramjet and scramjet
this section only seeks to list the highlights of the scramjet‟s development
here.
As mentioned previously, the scramjet is a direct
descendant of the ramjet. Therefore, in an attempt to provide a brief
historical timeline of the modern-day scramjet, we must first begin with the
invention of the ramjet. The first patent for a subsonic ramjet device,
specifically for what is now


Unfortunately, this program was
not able to be flight tested as the cost to repair the X-15 A-2 was too high
and the entire X-15 program was cancelled in 1968 . (Note: The damage referred
to here occurred during the first non-burning test flight when the shock wave
from the inlet spike impinged on the lower ventral fin, causing extensive
damage one of the first incidents of shock-shock interaction heating, which
became a major
In summary, the major propulsion
systems of the modern era have a direct correlation between the year of their
first flight and their current prevalence of application: Turbojet-1939,
Ramjet-1940, High-Performance Large Liquid-Fueled Rocket Engine-1943, Practical
Man-Rated Reusable Throttleable Rocket Engine-1960, and the Scramjet-2002.
However, despite the fact that no operational and readily available scramjet
engine currently exists, this is not due to a lack of potential applications
which would benefit greatly from the use of the scramjet.
1.4 DESIGN PRINCIPLE OF A
SCRAMJET ENGINE
Scramjet
engines are a type of jet engine, and rely on the combustion of fuel and an
oxidizer to produce thrust. Similar to conventional jet engines,
scramjet-powered aircraft carry the fuel on board, and obtain the oxidizer by
the ingestion of atmospheric oxygen (as compared to rockets, which carry both fuel and an oxidizing agent). This requirement limits scramjets to suborbital atmospheric propulsion
where the oxygen content of the air is sufficient to maintain combustion.
The scramjet is composed of three basic components: a converging inlet, where
incoming air is compressed; a
combustor, where gaseous fuel is burned with atmospheric oxygen to produce heat; and a diverging nozzle, where the heated
air is accelerated to produce thrust. Unlike a typical jet engine, such as a turbojet or turbofan engine, a scramjet does not use rotating, fan-like
components to compress the air; rather, the achievable speed of the aircraft
moving through the atmosphere causes the air to compress within the inlet. As
such, no moving parts are needed in a scramjet. In comparison, typical turbojet
engines require inlet fans, multiple
stages of rotating compressor
fans, and multiple rotating turbine stages, all of which add weight, complexity, and a greater number of
failure points to the engine.
Due to the nature of their design, scramjet operation is limited to near-hypersonic velocities. As they lack mechanical compressors, scramjets require the high kinetic energy of a hypersonic flow to compress the incoming air to operational conditions. Thus, a scramjet-powered vehicle must be accelerated to the required velocity (usually about Mach 4) by some other means of propulsion, such as turbojet, railgun, or rocket engines. In the flight of the experimental scramjet-powered Boeing X-51A, the test craft was lifted to flight altitude by a Boeing B-52Stratofortress before being released and accelerated by a detachable rocket to near Mach 4.5. In May 2013, another flight achieved an increased speed of Mach 5.1
Due to the nature of their design, scramjet operation is limited to near-hypersonic velocities. As they lack mechanical compressors, scramjets require the high kinetic energy of a hypersonic flow to compress the incoming air to operational conditions. Thus, a scramjet-powered vehicle must be accelerated to the required velocity (usually about Mach 4) by some other means of propulsion, such as turbojet, railgun, or rocket engines. In the flight of the experimental scramjet-powered Boeing X-51A, the test craft was lifted to flight altitude by a Boeing B-52Stratofortress before being released and accelerated by a detachable rocket to near Mach 4.5. In May 2013, another flight achieved an increased speed of Mach 5.1
1.5 BASIC PRINCIPLE OF A SCRAMJET ENGINE

Scramjets are designed to operate in the hypersonic flight regime, beyond the reach of turbojet engines, and, along with ramjets, fill the gap between the high efficiency of turbojets and the high speed of rocket engines. Turbo machinery based engines, while highly efficient at subsonic speeds, become increasingly inefficient at transonic speeds,as the compressor fans found in turbojet engines require subsonic speeds to operate.While the flow from transonic to low supersonic speeds can be decelerated to these conditions, doing so at supersonic speeds results in a tremendous increase in temperature and a loss in the total pressure of the flow.
Around Mach 3–4, turbomachinery is no longer
useful, and ram-style compression becomes the preferred method.Ramjets utilize
high-speed characteristics of air to literally 'ram' air through an inlet diffuser
into the combustor. At transonic and supersonic flight speeds, the air upstream
of
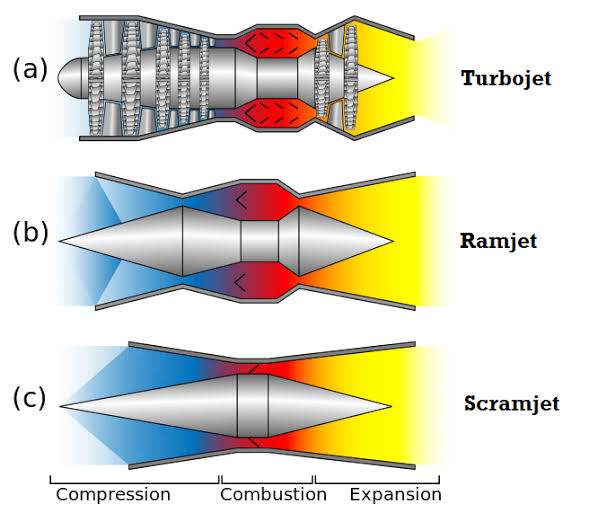
Fig 1.4 SCRAMJET ENGINE OPERATION
2. PROBLEM STATEMENT
2.1 PROBLEM DEFINITION
This chapter will provide the problem description as
well as the background theory and equations necessary to address the problem at
hand.

The above fig shows the reference geometry for our
simulation analysis. The model is already predefined by the author AUGUSTO F. MOURA, MAURÍCIO A. P. ROSA Instituto de Estudos Avançados (IEAv) Departamento de Ciência e
Tecnologia Aeroespacial
A scramjet (supersonic combusting ramjet) is a variant of a ramjet air breathing jet engine in which combustion
takes place in supersonic airflow. As in ramjets, a scramjet relies on high vehicle speed to
forcefully compress the incoming air before combustion (hence ramjet), but a ramjet decelerates the
air to subsonic velocities before combustion, while airflow in a scramjet is supersonic throughout
the entire engine. This allows the scramjet to operate efficiently at extremely
high speeds.
3. LITERATURE REVIEW

These geometric changes have produced a numerous shocks in inlet and remarkable influence on the flow in several aspects. However, the performance of these inlets tends to degrade as higher Mach number to lower Mach number. These inlets consisting of various ramps producing oblique shocks followed by a cowl shock is chosen in order to increase air mass capture and reduce spillage in scramjet inlets at Mach numbers below the design value. An impinging shock may force the boundary layer to separate from the wall, resulting in total pressure recovery losses and a reduction of the inlet efficiency. Design an inlet to meet the requirements such as Low stagnation pressure loss, High static pressure and temperature gain and deceleration of flow to a desired value of Mach number. Fixed geometry inlets can be used only over a relatively narrow range of Mach number while one method to improve this performance is to use variable-geometry inlets which can be used over a wide range of Mach number with reasonably good pressure recovery. A two dimensional analysis is carried out in this project. CATIA is used to create the model. GAMBIT is used to create the mesh. FLUENT is used to cover the flow analysis.

The following discretization scheme have been used within the project
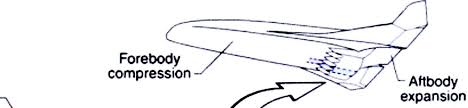
This study
is concerned basically with the air intake system of an airframe-integrated
scramjet engine, which is consisted of the vehicle forebody, the engine inlet
and the isolator duct (see Fig.1). Although many times the isolator duct, which
is located between the scramjet inlet and the combustor, is not included in
analyses of the compression system, here it was considered because of the
interest in knowing the airflow conditions at the combustor entrance. The
isolator has the main purpose of protecting the inlet from combustor high
pressure effects (adverse back pressure), although, in some situations, it also
contributes to the compression process. Efficient combustion of fuel requires
that supersonic airflow be supplied to the combustor at suitable pressure,
temperature and flow rate. In a hypersonic vehicle with scramjet propulsion it
is the air intake system that has this task.
2.2 PROPOSED SOLUTION
The
work aims to present numerical simulations and performance analyses of a
scramjet air intake configuration being tested for the 14-X scramjet engine
when the vehicle operates at different flight speeds, altitudes and angles of
attack. Besides, analyses have also been made for geometry deviations from the
reference configuration, in terms of the number and angle of the intake ramps.
For the numerical calculations, it has been considered 2D planar geometry and
the calorically perfect gas and non-viscous models for the airflow. The goal is
to have a better insight on the flow behavior in the air intake region of the
propulsion system when changing flight parameters such as speed, angle of
attack and altitude, for the reference configuration, and also to study the
impact of intake geometry changes on the overall intake performance.
3.1 DESIGN AND ANALYSIS ON SCRAMJET ENGINE INLETAQHEEL
MURTUZA SIDDIQUI1,
G.M.SAYEED AHMED
Research
Assistant, Muffakham Jah College of Engineering & Technology.,
Hyderabad-5000342 Senior Assistant professor, Muffakham Jah
College of Engineering& Technology., Hyderabad-500034 carried out The
scramjet is composed of three basic components: a converging inlet, where
incoming air is compressed and decelerated; a combustor, where gaseous fuel is
burned with atmospheric oxygen to produce heat; and a diverging nozzle, where
the heated air is accelerated to produce thrust. Unlike a typical jet engine,
such as a turbojet or turbofan engine, a scramjet does not use rotating,
fan-like components to compress the air; rather, the achievable speed of the
aircraft moving through the atmosphere causes the air to compress within the
inlet. As such, no moving parts are needed in a scramjet. In comparison,
typical turbojet engines require inlet fans, multiple stages of rotating
compressor fans, and multiple rotating turbine stages, all of which add weight,
complexity, and a greater number of failure points to the engine. The parts
described above can be seen in Figure below.
Due to the nature of their design, scramjet operation
is limited to near-hypersonic velocities. As they lack mechanical compressors,
scramjets require the high kinetic energy of a hypersonic flow to compress the
incoming air to operational conditions. Thus, a scramjet powered vehicle must
be accelerated to the required velocity by some other means of propulsion, such
as turbojet, railgun, or rocket engines. While scramjets are conceptually
simple, actual implementation is limited by extreme technical challenges.
Hypersonic flight within the atmosphere generates immense drag, and
temperatures found on the aircraft and within the engine can be much greater
than that of the surrounding air. Maintaining combustion in the supersonic flow
presents additional challenges, as the fuel must be injected, mixed, ignited,
and burned within milliseconds. While scramjet technology has been under
development since the 1950s, only very recently have scramjets successfully
achieved powered flight
3.2 A NUMERICAL INVESTIGATION OF
SCRAMJET
ENGINEAIR INTAKES FOR THE 14-X HYPERSONIC VEHICLEAUGUSTO F.
MOURA, MAURÍCIO A. P.ROSA
Instituto de EstudosAvançados(IEAv)
Departamento de Ciência e Tecnologia Aeroespacial TrevoCel. Aviador José
Alberto Albano do Amarante, São José dos Campos,Brasil carried outpar tofthe
research and development, at the Institute for Advanced Studies (IEAv), of the
first Brazilian hypersonic vehicle prototype, the 14-X airplane.It presents CFD
results and performance calculations of the air intake section of some scramjet
engine configurations under several operating conditions assuming 2D planar
geometry. The reference case considers the vehicle flying at Mach 7 and zero
angle of attack at an altitude of 30km. In thi scase, air compression is
achieved by two ramps,one of which is the vehicle forebody itself and the other
is a scramjet inlet compression ramp, and the engine cowl which satisfies
the“shock-onlip”condition. From this reference case,several other cases were
simulated varying vehicle operating conditions such as altitude, velocity and
angle of attack. Besides these, calculations were made for different
configurations of the scramjet inlet compression geometry by varying the inlet
compression ramp angle, as well as the number of inlet compression ramps. The
airflow in the intake is calculated numerically with the commercial Ansys
Fluent software, considering the air as a calorically perfect gas for inviscid
flow. For the intake performance analysis, several parameters characterizing
the intakes have been calculated and compared.
3.3 COMPUTATIONAL ANALYSIS OF SCRAMJET INLET
Murugesan,
Dilip A Shah and Nirmalkumar IndiaScramjet inlets are the most vital component
of the engine and their design having more effective on the overall performance
of the engine. Thus, the forward capture shape of the engine inlet should
conform to the vehicle body shape. A 2-D computational study for scramjet inlet
with different ramp length and angles are studied to compress the air by
blunted and sharp leading edge, moving the whole cowl up and down, deflecting
the cowl lip and axisymmetric inlet with sharp and blunted leading edge.
These geometric changes have produced a numerous shocks in inlet and remarkable influence on the flow in several aspects. However, the performance of these inlets tends to degrade as higher Mach number to lower Mach number. These inlets consisting of various ramps producing oblique shocks followed by a cowl shock is chosen in order to increase air mass capture and reduce spillage in scramjet inlets at Mach numbers below the design value. An impinging shock may force the boundary layer to separate from the wall, resulting in total pressure recovery losses and a reduction of the inlet efficiency. Design an inlet to meet the requirements such as Low stagnation pressure loss, High static pressure and temperature gain and deceleration of flow to a desired value of Mach number. Fixed geometry inlets can be used only over a relatively narrow range of Mach number while one method to improve this performance is to use variable-geometry inlets which can be used over a wide range of Mach number with reasonably good pressure recovery. A two dimensional analysis is carried out in this project. CATIA is used to create the model. GAMBIT is used to create the mesh. FLUENT is used to cover the flow analysis.
4. INTRODUCTION TO CFD


4.1
GENERAL
Computational Fluid Dynamics or CFD as it is
popularly known, is used to generate flow simulations with the help of
computers. CFD involves the solution of the governing laws of fluid dynamics numerically. The complex set of partial differential equations are solved on in
geometrical domain divided into small volumes, commonly known as a mesh (or grid).CFD has enabled us to understand the world in new ways. We can now see
what it is like to be in a furnace, model how blood flows through our arteries and
veins and even create virtual worlds. CFD enables analysts to simulate and
understand fluid flows without the help of instruments for measuring various
flow variables at desired locations.
Fluent is the CFD solver which can handle both structured grids, i.e. rectangular grids with clearly defined
node indices, and unstructured grids. Unstructured grids are generally of
triangular nature, but can also be rectangular. In 3-D problems, unstructured
grids can consist of tetrahedral (pyramid shape), rectangular boxes, prisms,
etc
4.2 Finite - volume approach
The commercial code Fluent solve
the governing integral equations for the conservation of mass and momentum, and
(when appropriate) for energy and other scalars, such as turbulence and
chemical species. In both cases a control-volume-based technique is used which
consists of,
·
Division of the domain into
discrete control volumes using a computational grid
· Integration of the governing
equations on the individual control volumes to construct algebraic equations
for the discrete
· Linearization
of the discretion equations and solution
of the resultant linear equation system, to yield updated values of the Fluent is a commercial 2D/3D unstructured mesh
solver, which adopts Multigrid solution algorithms. It uses a co-located grid,
meaning that all flow parameters are stored in the cell-centers.
Two numerical methods are available in Fluent:
Two numerical methods are available in Fluent:
·
Pressure-based solver
·
Density-based solver
The first
one was developed for low-speed in compressible flows, whereas the second was
created for the high-speed compressible flows solution. Although they have been
recently modified in order to operate for a wider range of flow conditions, in
the present study, which involves in compressible flows, the pressure-based
approach was preferred
Pressure
based solver
In the
pressure-based approach the pressure field is obtained by solving a pressure
correction equation, which results from combining continuity and momentum
equation. i.e., the pressure equation is derived in such a way that the
velocity field, corrected by the pressure, satisfies the continuity. The
governing equations are non-linear and coupled one another. The solution
process involves therefore iterations, wherein the entire set of governing
equations is solved repeatedly, until the solution converges.
Two types
of solution algorithms are available in Fluent:
· Segregated · Coupled
The segregated
pressure-based solver uses a solution algorithm
Where
the governing equations are solved sequentially (i.e., segregated) from one
another. The segregated algorithm is memory-efficient, since the discretized
equations need only be stored in the memory one at a time. However, the
solution convergence is relatively slow, inasmuch as the equations are solved
in a decoupled manner.
Pressure-Velocity
Coupling
Solution of
Navier-Stokes equation is complicated even because of the lack of an
independent equation for the pressure, whose gradient contribute to each of the
three momentum equations. Moreover, for incompressible flows like we have been
dealing with, the continuity equation does not have a dominant variable, but it
is rather a kinematic constraint on the velocity field. Thus, the pressure
field (the pressure
4.3 Discretization scheme
The following discretization scheme have been used within the project
·
First-Order
Upwind scheme
·
Second-Order
Upwind scheme
·
QUICK
scheme
The temporal discretization used for unsteady computations was
first order accurate. For pressure interpolation, the schemes adopted were the
default interpolation, which computes the face pressure using momentum equation
coefficients and the PRESTO (PREssure Staggering Option). The first procedure
works well as long as the pressure variation between cell centres is smooth.
When there are jumps or large gradients in the momentum source terms between
control volumes, the pressure profile has a high gradient at the cell face, and
cannot be interpolated using this scheme. Flows for which the standard pressure
interpolation scheme will have trouble include flows with large body forces,
such as in strongly swirling flows, natural convection and the like. In such cases,
it is necessary to pack the mesh in regions of high gradient to resolve the
pressure variation adequately. Another source of error is that Fluent assumes
the normal pressure gradient at the
4.4 Defining Boundary Conditions
Boundary
conditions (BCs) specify the flow variables on the boundaries of the chosen
physical model. They are therefore a critical component of a simulation, and it
is important they are specified appropriately. The utilized boundary conditions
follows, named as reported in the next chapters.
· Wall (no-slip)
Wall
boundary condition is used to bound fluid and solid regions, for instance the
blade surface in a wind turbine model. The no-slip condition is the default
setting for viscous flows and the shear-stress calculation in turbulent flows
follows the adopted turbulent model.
- Velocity-Inlet
Velocity inlet boundary conditions are used to
define the flow velocity, along with all relevant scalar properties of the
flow, at flow inlets. This BC is suitable for in compressible flows, whereas for
compressible flows will lead to a non-physical result because stagnation conditions
are floating. It is possible so set both constant and variable parameters, as
well as they can be alternatively uniform or non-uniformly distributed along
the boundary itself.
- Pressure-Outlet
It
means that a specific static pressure at outlet is set, and allows also a set
of backflow conditions to minimize convergence difficulties Symmetry.
It
is the analogous of a zero-shear slip wall in viscous flow. Zero normal
velocity is at a symmetry plane and zero normal gradients of all variables
exist there as well.
4.5
Post-processing
Fluent allows a complete post-processing of
solution data. Most of them are below. Moreover, the solution data can be
easily exported in a number of common file formats, to be analysed with other
post-processing tools.
·
Domain and grid visualization
·
Vectorial plots of solution
variables
·
Linear, surface, volume integrals
·
Iso-level and contour plots of
solution variables, within selected domain zones
·
Drawing two-dimensional and
three-dimensional plots
·
Tracking path-lines, stream
traces, etc.
Computational Fluid Dynamics (CFD) is the branch of
fluid dynamics providing a cost-effective means of simulating real flows by the
numerical solution of the governing equations. The governing equations for
Newtonian fluid dynamics, namely the Navier-Strokes equations, have been known
forever 150 years.
This chapter explains the turbulent and heat
transfer numerical models used in the present study. The governing equations
and boundary conditions for all studies are presented in this section. The
domain is separated into small cells to form a volume mesh (or grid) using the
program GAMBIT and algorithms in FLUENT are used to
However,
the development of reduced forms of these equations is still an active area of
research, in practical, the turbulent closure problem of the Reynolds-averaged
Navier-strokes equations. For non-Newtonian fuid dynamics, chemically reacting
flows and two phase flows, the theoretical development is at less advantage
stage
Experimental
methods has played an important role in validating and exploring the limits of
the various approximation to the governing equations, particularly wind tunnel
and rig tests that provide a cost-effective alternative to full-scale testing.
The flow governing equations are extremely complicated such that analytic
solutions cannot be obtained for most practical applications. Computational
techniques replace the governing partial differential equations with systems of
algebraic equations that are much easier to solve using computers.
The
steady improvement in computing power, since the 1950‟s,thus has led to the
emergence of CFD. This branch of fluid dynamics complements experimental and
theoretical fluid dynamics by providing cheaper means of testing fluid flow
systems. It also can allow for the testing of conditions which are not possible
or extremely difficult to measure experimentally and are not amenable to
analytic solutions.
Applying
the fundamental laws of mechanics to a fluid gives the governing equations
along with the conservation of energy equation form a set of coupled, nonlinear
partial differential equations. It is not possible to solve these equations
analytically for most engineering problems. However, it is possible to obtain
approximate computer-based solutions to the governing equations for a variety
of engineering problems. This is the subject matter of Computational Fluid
Dynamics
(CFD). There are three components in CFD analysis; the pre-processor, the solver, and the post-processor. Preprocessor is defined as a program that processes input data to produce output that is used as an input to the processor. There are a number of different solution methods which are used in CFD codes. The most common, and the one on which CFD is based is known as the finite volume technique.
(CFD). There are three components in CFD analysis; the pre-processor, the solver, and the post-processor. Preprocessor is defined as a program that processes input data to produce output that is used as an input to the processor. There are a number of different solution methods which are used in CFD codes. The most common, and the one on which CFD is based is known as the finite volume technique.
4.6. WHY TURBULENCE MODEL?
Fluctuations in the velocity field mix transported
quantities such as momentum and energy and cause the transported quantities to
fluctuate as well. These fluctuations can be of a very small scale and
therefore can create extremely large computational expenses for practical
engineering calculations. A modified set
of equations that require much less computational expense are used. This is
done by time-averaging the instantaneous governing equations which then contain
additional unknown variables. Turbulence models are needed to solve these
unknown variables. These models can be classified into two types are, (i) K – ε
and (ii) K – ω.
4.6.1 K-Epsilon TURBULENCE MODEL
The K-Epsilon model has become one of the most
widely used turbulence models as it provides robustness, economy and reasonable
accuracy for a wide range of turbulent flows. Improvements have been made to
the standard model which improves its performance and two variants are available
in Fluent; the RNG (renormalization group) model and the realizable model.
Three versions of the K-Epsilon model will be investigated here. The standard,
RNG, and realizable models have similar form with transport equations for k and
ε. The two transport
The turbulent Prandtl Numbers
governing the turbulent diffusion of k and ε.
The generation and destruction terms in the
equation for ε.
The method of calculating turbulent viscosity.
4.7 SOFTWARE USED
The software‟s used in this project are GAMBIT andFLUENT. GAMBITis
the program used to generate the grid or mesh for the CFD solver whereas
FLUENTis the CFD solver which can handle both structured grids, i.e. rectangular
grids with clearly defined node indices, and unstructured grids. Unstructured
grids are generally of triangular nature, but can also be rectangular. In 3-D
problems, unstructured grids can consist of tetrahedral (pyramid shape),
rectangular boxes, prisms, etc. Fluent is the world's largest provider of
commercial computational fluid dynamics (CFD) software and services. Fluent
covers general-purpose CFD software for a wide range of industrial
applications, along with highly automated, specifically focused packages.
FLUENT is a state-of-the-art computer program for modelling fluid flow and heat
transfer in complex geometries. FLUENT provides complete mesh exibility,
including the ability to solve your own problems using unstructured meshes that
can be generated about complex geometries with relative ease. Supported mesh
types include 2D triangular or quadrilateral, 3D tetrahedral hexahedral pyramid
wedge polyhedral, and mixed (hybrid) meshes. FLUENT is ideally suited for
incompressible and compressible fluid-flow simulations in complex geometries .
Solver
|
Density Based – Explicit Solver
|
|||
Gradient Option
|
Green Gauss – Node Based
|
|||
Turbulence Model Used
|
K-Epsilon (Standard)
|
|||
Boundary Condition
|
Pressure Far-Field and Pressure outlet
|
|||
Gauge (Absolute) Pressure ;
|
6.386 Pa, 223 k
|
|||
Temperature
|
||||
Courant Number
|
0.3
|
|||
All the PDE are solved based on
the
|
Second order Upwind scheme
|
|||
Absolute Criteria for
Convergence
|
1x10-23
|
|||
Material
|
Ideal Gas
|
|||
4.9 REFERENCE VALUES
The Altitude, Mach, Temperature and the corresponding Gauge Pressure
have been taken from the reference journal
Table 4.2 PRESSURE, TEMPERATURE,
DENSITY AND ALTITUDE VALUES

5.1 β AND δ VARIATIONS
Ramp Angle – Considered as Beta, and Del as
specified in the Picture above. We have varied number of Del angles keeping the
Beta (Ramp Angle at 20 Degree constant). And Keeping the Del 10 Degree Constant
Beta has been varied.

Table BASE LENGTH VALUE
CASE
|
PARAMETER
| |
Length
L1
|
657.34
| |
Length
L2
|
330
| |
Simulations have been carried out for various models by changing the
inlet and ramp anglefrom the base geopmetry.
Initially anslysis have been done for the base geometry using the base
reference values for Mach 1.8.



Velocity variations were also studied for the same
model. It was found that the shock is excatly formed at the upper inlet engine
case. Zoomed view of velocity magnitude over thebaseline model is shown in Fig
5.4 at a Mach of 1.8.

5.2 MODEL – 2 – HYPERSONIC INLET WITH DEL 10 DEGREE

Study is done by varying the angles. A new model is
generated having the del angle as 10 keeping the ramp angle constant.
Simulations have been carried out for the geometry at Mach 1.8. Resuts have
been found for pressure and velocity distribution for the model. The below
figures shows the variation of pressure and velocity distribution.
Fig 5.5 shows the generation of mes created for the
model. Triangular and Tetrahedral mesh was created over the geometry to capture
the model for the simulation.
Analysis have
been carried out
for the gometry
with del angle
10.
Simulation
results are shown in the below Figures.
Zoomed simulated view of static pressure over the model with del 10
degree when experiencing Mach 1.8 is shown in Fig 5.6. it is clearly seen that
the shock is formed at both the angles and pressure difference can be studied
from the contour.

Zoomed view of velocity magnitude over the model with del 10 deg when
experiencing mach 1.8 is shown in Fig
5.7

A new case model is studied for various Mach numbers by changing the del
angle as 5 degree. The geometry created is shown in the Fig 5.8.

By keeping the Mach 1.8 pressure and velocity distribution inside the inlet have been studied by comparing with the previous case. It can clealy seen from the simulations results that the compression ration have been increased inside the inlet geometry. This difference is created due to the varaition in the del angle made in the geomtery.


 Simulations have been carried out for the model
having del angle as 20 degree at Mach 1.8. the pressure distribution and
velocity variations have been studied.
Simulations have been carried out for the model
having del angle as 20 degree at Mach 1.8. the pressure distribution and
velocity variations have been studied.

Pressure
and velocity variations have been studied for the model.
The Mach number is kept constantn for this case
study.
By keeping the Mach 1.8 pressure and velocity distribution inside the inlet have been studied by comparing with the previous case. It can clealy seen from the simulations results that the compression ration have been increased inside the inlet geometry. This difference is created due to the varaition in the del angle made in the geomtery.
Zoomed view of pressure over the hypersonic inlet
model configuration with del 5 degree when experiencing Mach 1.8. Zoomed view
of velocity magnitude over the hypersonic inlet model configuration with del 5
degree when experiencing Mach 1.8 is shown in Figure 5.10.
5.4 HYPERSONIC INLET
MODEL CONFIG WITH DEL 15 DEGREE GENERATED IN GAMBIT
Here the del angle is varied to 15 degree. The
variation in the geomtery is shown in the Fig 5.11.

Simulations have been carried out for the model
having del angle as 15 degree at Mach 1.8. the pressure distribution and
velocity variations have been studied.
Zoomed view of static pressure over the hypersonic inlet model
configuration with del 15 degree when experiencing Mach 1.8 is shown in Figure
5.12
Simulations have been carried out for the model
having del angle as 20 degree at Mach 1.8. the pressure distribution and
velocity variations have been studied.
Zoomed view of velocity magnitude over the
hypersonic inlet model configuration with del 15 degree when experiencing Mach
1.8 is shown in Fig 5.13


Zoomed view of static pressure over the hypersonic
inlet model configuration with del 20 degree when experiencing Mach 1.8 is
shown in Fig 5.15

The del angle is varied from 5 degree to 20 degree and analysis have been carried out. For all the cases pressure distribution and velocity variations were studeid.
From the study it is clearly seen that for del angle of 10 degree we have got a good compression ratio. This can be clearly seen from the various pressure and velocity contours shown in the above figures for all cases.
5.6 HYPERSONIC INLET CONFIGURATION WITH DEL 10 DEGREE AND BETA (RAMP ANGLE) 25 DEG GENERATED IN GAMBIT
The next set of study is done by keeping the del
angle constant and varying the ramp angle from 25 degrees to 35 degrees with a
variation of 5 degree at each case.
The Fig 5.17 shows the basic variation of ramp
angle which is started at 25 degree having the other dimensions constant.
 Zoomed view of static pressure over the hypersonic
inlet configuration with del 10 degree and beta (ramp angle) 25 deg when
experiencing Mach 1.8 is shown in Fig 5.18.
Zoomed view of static pressure over the hypersonic
inlet configuration with del 10 degree and beta (ramp angle) 25 deg when
experiencing Mach 1.8 is shown in Fig 5.18.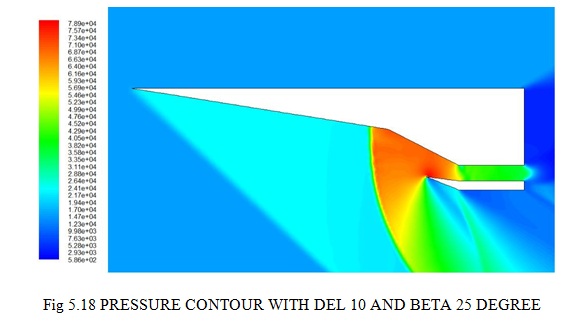
Zoomed view of velocity contours over the
hypersonic inlet configuration with del 10 degree and beta (ramp angle) 25 deg
when experiencing Mach 1.8 is shown in Fig 5.19.

5.7
HYPERSONIC INLET CONFIGURATION
WITH DEL 10 DEGREE
AND BETA (RAMP ANGLE) 30 DEG GENERATED IN GAMBIT

{kind=link}
The next set of sytudy is done by keeping the del
angle constant and varing the ramp angle from 25 degrees to 35 degrees with a
variation of 5 degree at each case. The Fig 5.17 shows the basic variation of
ramp angle which is started at 30 degree having the other dimensions constant.


5.8 HYPERSONIC INLET
CONFIGURATION WITH DEL 10 DEGREE AND BETA (RAMP ANGLE) 35 DEG GENERATED IN GAMBIT
The next set of sytudy is done by keeping the del
angle constant and varing the ramp angle from 25 degrees to 35 degrees with a
variation of 5 degree at each case.
The Fig 5.17 shows the basic variation of ramp
angle which is started at 35 degree having the other dimensions constant.

Zoomed view of pressure contours over the
hypersonic inlet configuration with del 10 degree and beta (ramp angle) 35 deg
when experiencing Mach 1.8 is shown in Fig 5.24

Zoomed view of velocity contour over the hypersonic
inlet configuration with del 10 degree and beta (ramp angle)35 deg when
experiencing Mach 1.8 is shown in Fig 5.25

From all the above study it been found that having
the beta angle of 25 degree gives a better compression ratio with less
separation.
The values obtained from the simulation results are
tabulated in the Table 5.1 and 5.2.

Hence, while varying (delta) the inlet angle, it has been observed
that (increased in the delta) angle creates a formation of local shock and
thereby causes compression. Whereas, at the same time greater the increase in
delta angle the reflection and the interaction of the shocks degrades/distorts
the uniformity of the flow and thereby reduces compression which is evident
from the above table.
Increase in delta angle =decrease in static pressure
Therefore based on the required design velocity at
the chamber, the optimum one can be selected. Here, delta 10 degree can be
selected because it achieves maximum compression and maximum velocity. So delta
10 degree is suitable for supersonic flows.

The above table 5.2 shows the optimum pressure and velocity values from
the pressure and contour plots
6.
CONCLUSION
The purpose of this paper was to determine at which
angle scramjet engine will achieves the maximum compression and maximum
velocity by eliminating the combustion instability of the propulsion system
while performance is maintained in the same flow path at the higher. And to
define how, it could be accomplished. Hence a scramjet engine was then modelled
in GAMBIT and analysis was carried out in FLUENT for the same with different
models.
It was found that the delta angle 10 degree was
feasible as it matched the theoretical values with CFD values. By this analysis
we can conclude k-epsilon turbulence model exactly simulates the flow field
characteristics in Supersonic and hypersonic condition in capturing shocks at
leading edges and shock trains in the isolator and etc.
In future
scope in the design of this particular scramjet engine, we can varying the Mach
number and varying ramp to determine the appropriate inlet performance.
Preliminary results revealed that ramp angle of 25 degree shows good
performance relative to the other configurations.
REFERENCES

FUTURE SCOPE
Ø Curran, Edward T.Scramjet Engines: The First Forty Years. Journal of
Propulsion and Power, Volume 17, No. 6, November-December 2001.
Ø Fry, Ronald S.A Century of Ramjet Propulsion Technology Evolution.
Journal of Propulsion and Power, Volume 20, No. 1, January-February 2004:
27-58.
Ø Waltrup, Paul J. Upper Bounds on the Flight Speed of Hydrocarbon-Fuelled
Scramjet-Powered Vehicles. Journal of Propulsion and Power, Volume 17, No. 6,
November-December 2001: 1199-1204.
Ø Builder, C.H. On the Thermodynamic Spectrum of Airbreathing
Ø Propulsion AIAA 1st Annual Meeting, Washington, D.C., June 1964.AIAA
Paper 64-243.
Ø Heiser, William H., David T. Pratt, Daniel H. Daley, and Unmeel B.
Mehta. Brief Description of the HAP Software
Ø Zucrow, Maurice J., and Joe D.
Hoffman. Gas Dynamics. Vol. 1. New York: John Wiley & Sons, Inc., 1976.
Ø Anderson, Jr., John D. Modern
Compressible Flow with Historical erspective. 2nd Ed. New York: McGraw-Hill
Company,
1990
Ø Analysis And Design Of A Hypersonic Scramjet Engine
With A Starting Mach Number Of 4.00 By Kristen Nicole Roberts. August 2008
Comments
Post a Comment